Driver motor L298N merupakan module driver motor DC yang paling banyak digunakan atau dipakai di dunia elektronika yang difungsikan untuk mengontrol kecepatan serta arah perputaran motor DC.

Bentuk fisik IC L298 & Modul Driver Motor L298N
IC L298 merupakan sebuah IC tipe H-bridge yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC dan motor stepper.
Pada IC L298 terdiri dari transistor-transistor logik (TTL) dengan gerbang nand yang berfungsi untuk memudahkan dalam menentukan arah putaran suatu motor dc maupun motor stepper.
Untuk dipasaran sudah terdapat modul driver motor menggunakan ic l298 ini, sehingga lebih praktis dalam penggunaannya karena pin I/O nya sudah terpackage dengan rapi dan mudah digunakan.
Kelebihan akan modul driver motor L298N ini yaitu dalam hal kepresisian dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.
Pin out dari driver motor l298

Keterangan :
- Enable A : berfungsi untuk mengaktifkan bagian output motor A
- Enable B : berfungsi untuk mengaktifkan bagian output motor B
- Jumper 5vdc : sebagai mode pemilihan sumber tegangan 5Vdc, jika tidak dijumper maka akan ke mode sumber tegangan 12 Vdc
- Control Pin : Sebagai kendali perputaran dan kecepatan motor yang dihubungkan ke Mikrokontroler
[irp]
Spesifikasi dari Modul Driver Motor L298N
- Menggunakan IC L298N (Double H bridge Drive Chip)
- Tegangan minimal untuk masukan power antara 5V-35V
- Tegangan operasional : 5V
- Arus untuk masukan antara 0-36mA
- Arus maksimal untuk keluaran per Output A maupun B yaitu 2A
- Daya maksimal yaitu 25W
- Dimensi modul yaitu 43 x 43 x 26mm
- Berat : 26g
Tutorial Pertama mengakses modul L298N dengan Arduino Uno
Bahan yang diperlukan untuk tutorial ini antara lain :
- Arduino Uno
- Komputer + Software IDE Arduino
- Modul Driver Motor L298
- 2 Motor DC 5v
- Kabel Jumper
Skema yang perlu dirangkaikan
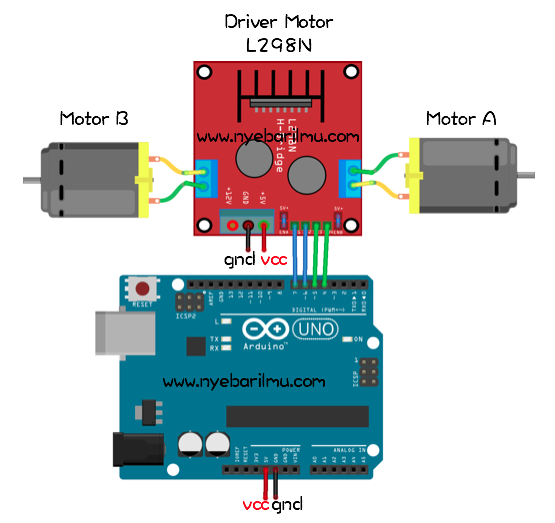
Keterangan pin
- Enable A : jumper
- Enable B : jumper
- Input Logic : A (7,6) , B (5,4)
/* www.nyebarilmu.com */
//mendefinisikan pin yang digunakan untuk control pin
int IN_1 = 4;
int IN_2 = 5;
int IN_3 = 6;
int IN_4 = 7;
void setup()
{
//mendefinisikan control pin sebagai output
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
}
void loop()
{
//Putar Mesin searah jarum jam
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
delay(1500);
//Untuk mesin A
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, HIGH);
delay(1000);
//Putar Motor B searah jarum jam
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
delay(1500);
//Untuk mesin B
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, HIGH);
delay(1000);
//Putar Motor a berlawan arah jarum jam
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
delay(1500);
//Untuk mesin A
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, HIGH);
delay(1000);
//Putar Motor B berlawan arah jarum jam
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
delay(1500);
//Untuk mesin B
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, HIGH);
delay(1000);
}
[irp]
Koding pemrograman alternatif menggunakan Library
Untuk pemrograman alternatif ini dapat memanfaatkan library dari pihak ketiga yang langsung di eksport ke library arduino IDE.
Library yang digunakan : [ddownload id=”1523″]
Cara instalasi libraries diatas :
- Download libraries
- Buka Arduino IDE
- Pilih sketch > include library > add. ZIP library
- pilihlah file Library Arduino_L298_master > open
- Jika sudah ada tulisan “Library added to your libraries“
- Pastikan dengan File > Examples > Arduino_L298_master

Kode pemrograman
/* --- www.nyebarilmu.com --- */
//menginclude libraries driver motor L298
#include <L298N.h> //Menyertakan library DRIVER MOTOR L298N
//inisialisasi pin yang digunakan
const int EN_A = 0;
const int IN_1 = 7;
const int IN_2 = 6;
const int IN_3 = 5;
const int IN_4 = 4;
const int EN_B = 1;
L298N driver(EN_A,IN_1,IN_2,IN_3,IN_4,EN_B);
int waktu_tunda = 1000; //waktu tunda
int kecepatan = 150; //kecepatan default tutorial ini (max kecepatan) 255
void setup(){}
void loop()
{
//Kedua motor bergerak CW sesuai dengan kecepatan 150, dalam waktu 1 detik
driver.forward(kecepatan,waktu_tunda);
driver.full_stop(waktu_tunda); //berhenti keduanya
//motor kanan saja yang bergerak
driver.turn_right(kecepatan,waktu_tunda);
driver.full_stop(waktu_tunda); //berhenti
//motor kiri saja yang bergerak
driver.turn_left(kecepatan,waktu_tunda);
driver.full_stop(waktu_tunda); //berhenti
//Kedua motor bergerak CCW sesuai dengan kecepatan 150, dalam waktu 1 detik
driver.backward(kecepatan,waktu_tunda);
driver.full_stop(waktu_tunda); //berhenti keduanya
}
Pada program diatas dapat diamati langsung pergerakan dari motor yang dipasang.
Terimakasih sudah berkunjung, dan semoga bermanfaat. Salam nyebarilmu.com!
Terima kasih banyak gan…Gan simulasi diatas menggunakan aplikasi apa??
Kalo untuk simulasi ane gunain proteus sama fritzing, gan
Terimakasih Gan atas sharing ilmu nya semoga berkah terus sukes terus, berkarya lebih banyak lagi…
iya gan, thanks sudah berkunjung
gan ane mau nanya itu harus di hubungin ke power supply apa engga? kalo misalkan ane gak pake power supply ane ganti batre tetep bisa jalan gak ?
masih bisa jalan gan, dicoba saja
itu tegangannya harus pake power supply ? kalo di ganti batre bisa gak ?
Bisa banget gan, kalo diganti dengan baterai